önvezető autó
Nissan-féle avatarod lesz vezetés közben
2019.04.20.
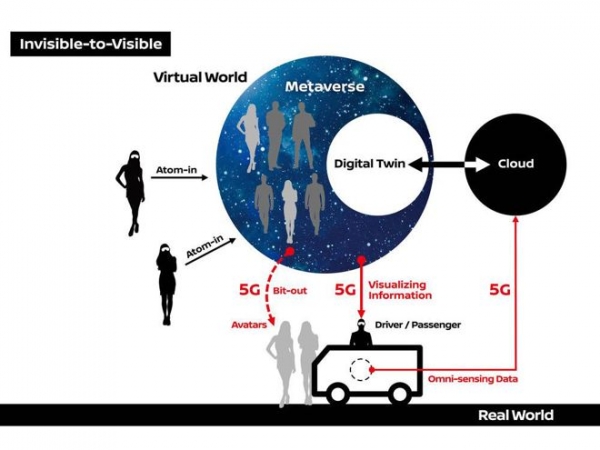
Az Invisible-to-Visible (I2V) elsőként a Nissan vonatkozásában jelent meg a 2019-es Las Vegas-i CES kiállításon, és most a vezetés világában is feltűnik. A jármű információgyűjtése külső és belső szenzorokon keresztül valósul meg, felhőn keresztül. Ez lehetővé teszi a vezető számára, hogy a jármű teljes környezetével tisztában legyen, beleértve az alapból nem belátható részeket, például épületek mögötti tereket.
A Nissan Omni-Sensing technológiája valós idejű adatgyűjtést folytat a közlekedési és az autós környezetből, valamint még annak belsejéből is: a Seamless Autonomous Mobility (SAM) technológia analizálja a begyűjtött információt, míg a ProPilot félig önvezető vezetéstámogató rendszer a jármű környezetéről szolgáltat adatot.
A Nissan I2V megoldása nemcsak biztonságosabbá teszi a vezetést, de egyúttal kényelmesebbé is. Például, amikor esőben kell haladnunk, a jármű belterében mesterségesen generált napos idővel találkozhatunk, s avatarokon keresztül kommunikálhatunk a többi utassal a Metaverse-ben. Egyebek mellett az I2V teszteken azt vizsgálják, hogyan viselkednek az avatarok és milyen a kapcsolat közöttük.
A Nissan jelenleg a tesztközpontjában dolgozik ezen a projekten Yokokukában, egy NV350-es modell átépített változatával. Az 5G-s internetet az NTT Docomo biztosítja az avatar adatok és a jármű kamerája által készített fényképek továbbítására.
- Log in to post comments
Forrás:
www.springerprofessional.de

További cikkeink a témában
Az oldal fő támogatója
![]()


