kutatás
Változtatható geometriájú futóműre épülő független kormányzás irányítástervezése
2016.02.03.
szerző: Fényes Dániel
Összefoglalás
Dolgozatom fő témája irányítástervezés változtatható geometriája futóművekhez, amellyel a járműkerekek független kormányzása kormánymű nélkül megvalósítható. Jelen tanulmányban egy, a felfüggesztésben elhelyezett beavatkozó segítségével változatom a felfüggesztés kormánylegördülési sugarát mely segítségével létrehozható a kívánt kormányszög. Dolgozatom célja a futómű geometriai modellezése Matlab SimMechanics környezetben, és egy kétszintű pályakövető lineáris kvadratikus (LQ) optimális irányítás tervezése. Ebben az irányítási struktúrában az alsószintű szabályzó a beavatkozó segítségével létrehozott futómű geometria változásért felel, a kerékpár modell alapján tervezett felsőszintű szabályzó pedig a jármű trajektória követését biztosítja.
1 Bevezetés
1.1 Motiváció
Az elmúlt évtizedekben az autóipar egyik fontos célkitűzése a gépjárművek súlyának csökkentése, ami által nem csak a gyártási költségek mérsékelhetőek, de a járművek által felhasznált üzemanyag mennyisége is. Napjainkban több kutatás is foglalkozik a járművek egyes részegységeinek kiváltásának lehetőségeivel. Egy ilyen lehetőség az agymotoros járművek esetén alkalmazott differenciális keréknyomatékkal megvalósított kormányzás, ami által kiváltható a gépjármű kormányműje. Jelen vizsgálat célja egy új változtatható geometriájú futóműre épülő kormányzási struktúra kidolgozása és irányítástervezése, amely a későbbiekben összehangolható az agymotoros járművek differenciális keréknyomatékán alapuló kormányzással.
1.2 Irodalomkutatás
Az utóbbi évtizedekben számos új kutatási és fejlesztési tendencia alakult ki a gépjármű fejlesztés területén [1]. Az autóipar jelentős hangsúlyt fektet a városi közlekedés, az alternatív üzemanyagok, a járműbiztonsági rendszerek, környezetbarát és hatékony gyártás fejlesztésére. Több folyóirat cikk, konferencia előadás is született ebben a témakörben. Egy új lehetőség a gépjármű biztonság területén a változtatható geometriájú felfüggesztések alkalmazása. Amely kialakítás több előnnyel is rendelkezik: egyszerű struktúra, alacsony energiafogyasztás és alacsony költségvonzat [2] [3]. Mivel a gazdaságossági és biztonsági tulajdonságait elsősorban a jármű kialakítása, illetve a jármű dinamikája határozza meg, emiatt egyre fontosabb kérdéssé vált a megfelelő szabályozás kialakításra. A kontrol bemenete változtatható geometriájú futóművek esetén az első és hátsó kerekek kerékdőlése, mellyel kritikus helyzetekben, mint éles kanyarodás, kettős sávváltás és egyéb veszélyes manőverek esetén támogatni tudja a vezetőt. Az irányítási rendszereknek garantálniuk kell a jármű pályakövetését, borulásgátlását, figyelembe véve a geometria korlátokat. Az évek során a pontosabb irányítástervezés támogatásához, több nem lineáris futómű modell is kifejlesztésre került, mind a MacPherson struktúrához [4], mind a háromszög-trapéz keresztlengőkaros futómű geometriához [5]. A változtatható geometriájú futóművek széles körben alkalmazhatóak, többek között a már említett járműdőlés szabályozásához, mely során a járműborulási centrumát helyezzük át a jobb menetdinamika biztosításához [6]. Jelen vizsgálat célja a jármű pályakövetésének biztosítása változtatható geometriájú futómű alkalmazásával.
1.3 Futómű kiválasztása
A vizsgálat első és egyik legfontosabb lépése az alkalmazandó futómű geometria kiválasztása volt. A modern személygépjárműveknél két legelterjedtebb típus a MacPherson (1.1. ábra), illetve a háromszög-trapéz keresztlengőkaros (1.2. ábra) struktúra. Mindkét kialakítás különböző előnyökkel, illetve hátrányokkal rendelkezik. Általánosan elmondható, hogy a MacPherson felfüggesztés egyszerűbb kialakítású, ezáltal az előállítási költsége viszonylag alacsony. Hátrányának róható fel a kedvezőtlenebb futási tulajdonság.
Jelen dolgozat célja, hogy kizárólag a kormánylegördülési sugár (rợ) változtatásával - bármelyen egyéb kormányszerv nélkül - adott sebesség mellett az abroncsokon létrejövő hosszirányú erő által létrehozott nyomaték segítségével állítsuk elő a megkívánt kormányszöget.

1.1. ábra Macpherson felfüggesztés
1.2. ábra keresztlengőkaros felfüggesztés
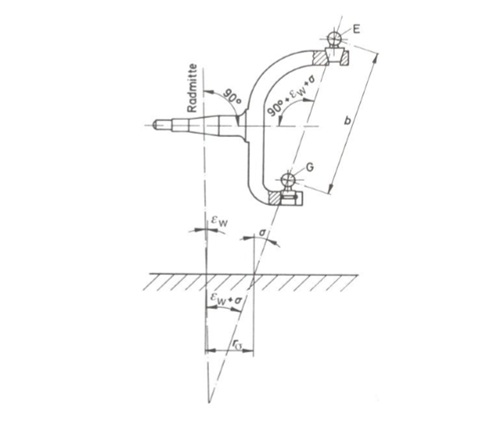
A kormánylegördülési sugár meghatározása mindkét esetben hasonló módon történik. A gömbcsuklók középpontjainak, - E illetve a G pontok- összekötésével megkapott egyenes reprezentálja a felfüggesztés elkormányzási tengelyét. Az e tengely és a talaj döféspontja illetve az abroncs felfekvési pontja áltál meghatározott szakasz lesz az adott felfüggesztés legördülési sugara. Általánosságba elmondható, hogy míg a háromszög-trapéz keresztlengőkaros struktúrát viszonylag nagy pozitív kormánylegördülési sugárral szokták előállítani, addig a MacPherson felfüggesztést nulla közeli, illetve akár negatív kormánylegördülési sugárral is gyártható. E megfontolások alapján érdemesebb a Macpherson kialakítást választani a vizsgálathoz, mivel elengedhetetlen mindkét irányba előállítani a kormánylegördülési sugarat.
A kormánylegördülési sugár változtatása több módon is elérhető. Az egyik lehetőség a változtatható geometriájú futóműveknél gyakran használt módszer; a felfüggesztés bekötési pontjainak módosítása beavatkozó segítségével. Jelen esetben ezek a pontok a rugó-csillapító tag E pontja, illetve az ábrán nem jelölt alsó lengőkar végpontja. Ezen pontok elmozdításával elérhető az elkormányzási tengely módosítása, ezáltal a kormánylegördülési sugár változása, de ez a módszer nagymértékű nem kívánt módosítást hajt végre a futóművön, többek között olyan irányú kerékdőlést hozz létre, mely éppen ellenkezőleg hat a kormánylegördülési sugárra. Egy másik lehetőség, hogy a kerék és a felfüggesztés közé elhelyezett beavatkozóval direkt kerékdőlést létrehozva módosítani az abroncs felfekvési pontját. Ez a módszer minimális geometria változással jár, így csökkenthetőek a nem kívánt változások. Ezért a vizsgálathoz ezt a módszert választottam.
1.4 Irányítási struktúra
A vizsgálat során egy kétszintű hierarchikus irányítási struktúra kerül alkalmazására melynek blokkvázlata a 1.1-es ábrán látható. E struktúrában a felsőszint reprezentálja magát a járművet (Vehicle), a kontroller (Kupper) pedig biztosítja a pályakövetést biztosító referenciajel követését, illetve előállítja az ehhez szükséges alsószintű kontroller referencia jelét. Az alsószint reprezentálja a jármű felfüggesztését (Suspension) , illetve a kontroller (Klower) biztosítja a kívánt kerékdőlés létrejöttét.

1.3 ábra Irányítási struktúra
A hierarchikus irányítás előnye, hogy a bonyolult rendszert kisebb egységekre felbontva egyszerűbb, kezelhetőbb rendszereket kapunk, melyekhez egymástól függetlenül megtudjuk tervezni az egyes szabályzókat.
A cikket folytatjuk. A cikk a szerző TDK dolgozatának része. A kutatómunkát tartalmi változtatás nélkül közöltük.
konzulens: Dr. Németh Balázs, Magyar Tudományos Akadémia, Számítástechnikai és Automatizálási Kutató Intézet
- A hozzászóláshoz be kell jelentkezni

További cikkeink a témában
Az oldal fő támogatója
![]()












