automatizált vezetés
Közúton fogja tesztelni automatizált autóit a Volvo
2015.02.22.

Számos biztonsági háttér-rendszert is beépítenek az autókba, amelyek azért felelnek, hogy ha az automatizált vezetésre képes rendszer bármely része meghibásodik, akkor az autó biztonságosan megálljon. Akkor is megáll a jármű, ha egyéb problémát érzékel magán, például egy defektes gumiabroncsot. Ha váratlan időjárási körülmény lép fel, vagy a kocsi elérte az úti célját, akkor az irányítást visszaadja a vezetőnek, aki, ha nem reagál, akkor a Volvo egy biztonságos helyre vezeti magát, és megáll.
A kísérleti autók radarokat, kamerákat és lézer szenzorokat használnak majd a környezet feltérképezésére, ezek közül számos már ma is elérhető az új XC90-eshez. Természetesen a vezérlés össze lesz kötve a beépített navigációs rendszerrel is, hogy a lehető leghatékonyabb utat válassza ki magának a kocsi.

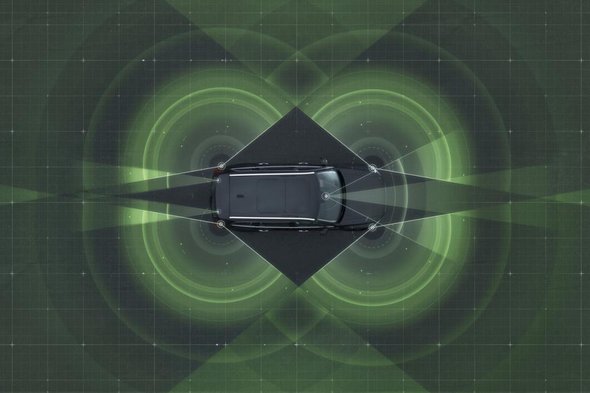
A szélvédőbe épített radar és kamera olvassa a közlekedési táblákat és érzékeli az út kanyarodását, a többi autót és a gyalogosokat. Ezen kívül a kocsi minden sarkán is van egy radar, amelyek az úton és az út mellett lévő tárgyakról (villanyoszlopok, csatornafedelek, padkák) adnak információkat a vezérlésnek, emellett a kocsi aktuális helyzetét is folyamatosan vizsgálják.
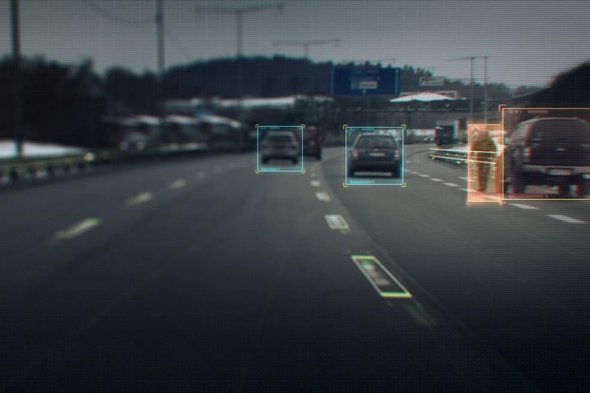
A lézer a kocsi orr-részének alján helyezkedik el, feladata, hogy 150 méteres távolságban észrevegye az XC90 útjában lévő objektumokat, de a szélvédő tetején lévő kamera is segít neki, ugyanis felismeri a gyalogosokat, kerékpárosokat, és a váratlan veszélyhelyzeteket. Itt három kamerát építettek egybe, mind a három más látószöggel rendelkezik.
A 100 darab kísérleti autót Göteborg környékén fogják használni a Volvo ügyfelei, akiket 2016-ban fognak kiválasztani a feladatra. Az autókat lízingelhetik majd az ügyfelek. 2017-től 2019-ig tart majd a próbaüzem, azután 2020-ban a szériagyártása is megkezdődhet az automatizált vezetésre képes Volvóknak.
- A hozzászóláshoz be kell jelentkezni

További cikkeink a témában
Az oldal fő támogatója
![]()












