Kommunikáció
Ha az autó beszélni tudna (1. rész) - Kommunikáció gépjárművekben és gépjárművekkel
2017.01.18.
Mennyi a sok számokban kifejezve?
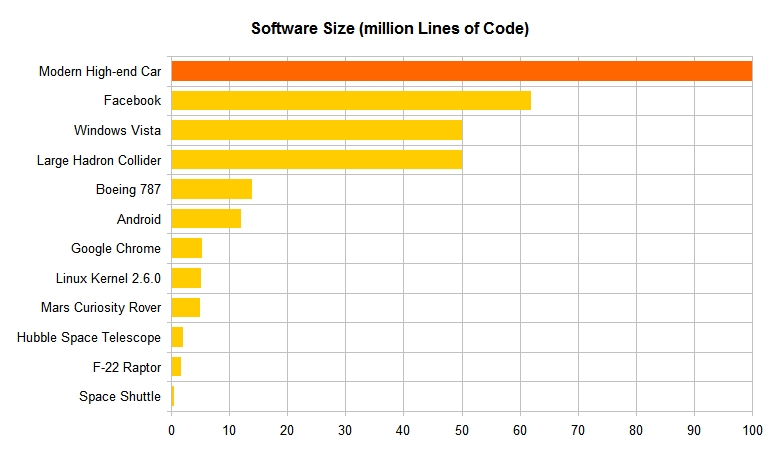
Unalomig elcsépelten hangozhat már, hogy az autók milyen sokat fejlődtek az elmúlt 20 évben, ezért kigyűjtöttünk néhány adatot, amivel szemléltethető, hogy hol is tart ma a járműipar. Talán elsőként érdemes megemlíteni a járművekben található saját logikával rendelkező elektronikus egységek (ECU-k) számát. Egy, a gyártósorról ma legördülő autóban minimum 40, de egy prémium kategóriába tartozó, gazdagon felszerelt autóban akár 150 vezérlő is lehet. Ezekbe a vezérlőkbe mintegy 100 millió sor programkódot írtak a szoftverfejlesztők. Ez a szám majdnem 20-szorosa egy modern repülőgép, például a Boeing 787 Dreamliner programsor-számának. De a Windows és az Android operációs rendszerek programkódjai sem tartalmaznak annyi sort, mint egy mai autó vezérlői.
Mivel ezen elemeknek egymással kommunikálni kell, ezért valamilyen adattovábbító közegre is szükség van. Az esetek túlnyomó részében ezek réz vagy alumínium kábelek, ritka alkalmakkor optikai kábelek. Egy ma gyártott személyautóban körülbelül 30-50 kg-ot tesz ki a kábelezés a jármű saját tömegéből.

Belső kommunikáció
A járművön belüli kommunikáció az adott alrendszer sávszélesség-igénye és biztonságkritikussága alapján más és más kommunikációs protokoll és fizikai hálózaton történik. Eddig 4 rendszer terjedt el a gyakorlatban: LIN, CAN, MOST, FlexRay. Általában az alrendszerek egymástól fizikailag is elkülönülnek, hogy a biztonságkritikus rendszereket védjék az esetleges külső beavatkozásoktól. Amióta a szórakoztató elektronika (multimédia) a járműben internetelérést is lehetővé tehet, azóta a jármű belső rendszeréhez könnyen hozzáférhet egy hacker, anélkül, hogy fizikailag a járműhöz csatlakozna vagy a közelében lenne. Sajnos voltak is ilyen jellegű visszaélések, főleg abban a kezdeti időszakban, amikor megjelentek az első SIM-kártyák a szórakoztató elektronikában, és az nem volt kellő biztonsággal leválasztva a többi rendszerről. (A járműben található kommunikációs rendszerekről részletes cikkeket fogunk közölni.)
Autó-autó kommunikáció
A járművek közötti kommunikáció egyelőre még gyerekcipőben jár, de már vannak kezdeményezések és forgalmi tesztek, hogy működését elemezzék és fejlesszék. Az IEEE 802.11 szabványt használták fel a járművek egymás közötti információcseréjéhez, vagyis a kommunikáció alapja a Vezetéknélküli LAN (WLAN) hálózat és az 5,9 GHz-es frekvenciatartomány. Ezt az európai és az amerikai fejlesztési irány is elfogadta. Amint legalább két jármű olyan közel kerül egymáshoz, hogy érzékelik egymás WiFi-jeleit, ad hoc jelleggel egy hálózatot hoznak létre, és megosztják egymással a saját adataikat, figyelmeztetéseiket. Mivel a Wi-Fi hatótávolsága pár száz méterre korlátozódik, ezért a folyamatos adatátvitelhez ezek az ad hoc hálózatok (állomások) egymást felhasználva tudnak csak távolabbi járműveknek információt továbbítani. Ilyenkor routerként funkcionálnak.
A járművek közötti kommunikáció egyértelmű előnye, hogy tudjuk figyelmeztetni a többieket egy forgalmi akadályra, valamilyen veszélyre, a saját járművünk problémájára vagy az útburkolat hibájára, és mindehhez nekünk semmilyen erőfeszítést nem kell tennünk.

Ha jobban belegondolunk ugyanilyen elven működnek a forgalmi viszonyokat figyelembe vevő, internetkapcsolattal rendelkező útvonaltervezők, melyek a többi autó mozgását figyelve tudnak következtetni az adott útvonal telítettségére és felhívják a figyelmet a fennakadásokra. Ebben a tekintetben ez a fajta kommunikáció már most is működik, csak egyelőre a jármű közvetlen csatlakoztatása nélkül.
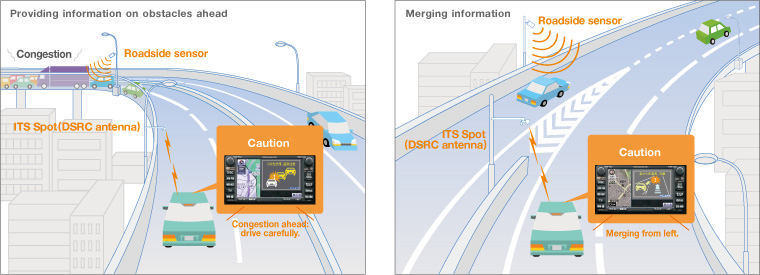
Autó-infrastruktúra kommunikáció
Az infrastruktúra is bevonható az előbb leírt kommunikációs hálózatba, így a járművezető többletinformációt kaphat a külvilágról. A forgalmi táblák és forgalomirányító lámpák hasznos adatokkal látják el a sofőrt, aki lehet egy ember, de lehet maga az autó is. Az önvezető járművek elterjedését és működési megbízhatóságát segíthetik ezek az intelligens infrastruktúra elemek, melyek digitális adatküldéssel tudják segíteni a robotpilóta munkáját. Néhány példa, hogy milyen adatokat kaphat az autó külső forrásból:
- rendőrlámpa színe
- hőmérséklet adatok, fagyásveszélyre figyelmeztetés
- közúti jelzőtábla adatok (például tilos balra kanyarodni a kereszteződésben stb.
Ha ez a kommunikáció is kétirányú, akkor megvalósítható a rendőrlámpák állítása, ha egy megkülönböztetett jelzést használó autó érkezik a kereszteződésbe, és a forgalomhoz igazított kereszteződés-irányításhoz sem kell forgalomszámlálást végezni és időszakoknak megfelelően előre programozni a lámpákat, mert elő adatok alapján elvégezhető a vezérlés.
Mivel az infrastruktúra életciklusa hosszabb, mint a járműveké és adatbiztonság szempontjából is a jármű-infrastruktúra közötti kapcsolat a kritikusabb, ezért valószínűleg ez a fajta kommunikáció fog később elterjedni.
- A hozzászóláshoz be kell jelentkezni
Forrás:
http://www.car-to-car.org http://www.toyota-global.com https://www.extremetech.com

További cikkeink a témában
Az oldal fő támogatója
![]()












